県内カメラ351点 — folium 多層マップと点配置の空間統計
学習目標
- 位置情報付きCSVを folium で 多層 (MarkerCluster + HeatMap) マップ として描き、用途別に切り替えて見せられる
- haversine 距離で球面上の距離を扱い、k-NN (k=1,3,5) 距離分布を計算できる
scipy.spatial.Voronoiで各点の 担当面積分布を出し、点配置の偏りを定量化できる- 同じ領域に Poisson 配置を生成し、最近傍距離分布を実データと比較 (KS 検定 / Clark-Evans R) して 「ランダムか/クラスタ的か」を 統計的に判定できる
- 管理者区分 (国/県/市) で 空間集中度がどう違うかを箱ひげ図で比較できる
使用データ
- 名称 県内のカメラ情報 (道路・河川・ため池 ほか)
- 出典 DoBoX dataset 1279
- 件数 351 台 (本実装で全行使用)
- 列 No., カメラ名, 住所, 路河川名等, 緯度, 経度, 公開URL, 所管, 管理区分
- 空間範囲 北緯 34.09 〜 35.08, 東経 132.09 〜 133.41 (広島県全域)
データ取得手順
| 論題 | データセット | DL | 保存先 | 形式 | サイズ |
|---|---|---|---|---|---|
| 県内カメラ情報 | DoBoX #1279 | ページから DL ボタン | data/camera_list.csv | CSV (UTF-8, ヘッダ1行, 351 行) | 約 70 KB |
一括取得(全レッスン共通, 推奨):
cd "2026 DoBoX 教材"
py -X utf8 data\fetch_all.pyfetch_all.py はカタログ・追加データを data/ と data/extras/ に再現可能ダウンロード。DoBoX のオープンデータは申請不要、商用・非商用とも利用可。本レッスンの .py スクリプトは、データが無ければ自動取得してから処理を始めるよう実装されています(ensure_dataset() ヘルパ)。
スクリプト(全体ソースコード)
cd "2026 DoBoX 教材"
python -X utf8 lessons/L02_camera_map.py方法
- 多層 folium マップ:
MarkerCluster(区分別色) とHeatMap(密度) を 2 レイヤとして重ね、LayerControlで切替可能にする →L02_map.html - k-NN 距離:
cKDTreeで k+1 近傍 index を高速取得 → 正確な haversine で距離 (km) を確定。k=1, 3, 5 でヒストグラム化 - Voronoi 担当面積: 緯度経度 → 局所平面 (km, 等距離近似) に投影 →
scipy.spatial.Voronoi→ 有限セルだけ Shoelace で面積を出し対数ヒストグラム - Poisson 比較: 同 bounding box 内に同数 (351点) の一様乱数を 50 回生成 → 実 NN 分布と KS 検定 + Clark-Evans R
- 管理者別比較: 所管文字列を 国/県/市/その他 に粗分類 → 同区分内の NN 距離分布を箱ひげで比較。短い ⇒ 集中、長い ⇒ 散在
コード解説
↑ L02_camera_map.py 行 480–656
結果
1. 多層インタラクティブ地図 (MarkerCluster + HeatMap)
※ 右上のレイヤ切替で MarkerCluster (区分別色付き、ズーム連動でクラスタ展開) と HeatMap (密度) を切り替え可能。各点クリックでカメラ名・所管・ライブ映像URLを表示。
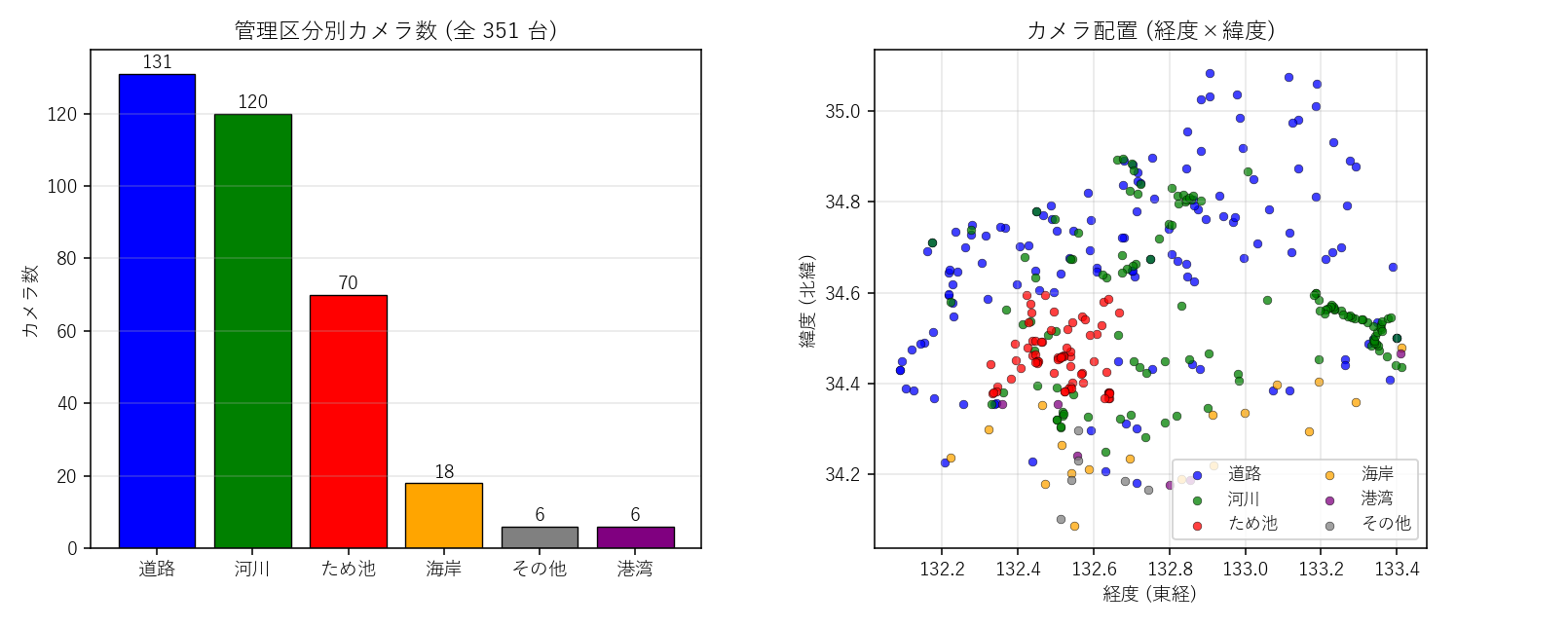
左: 管理区分別カメラ数 (道路131・河川120・ため池70・海岸18・港湾6・その他6) / 右: 経度×緯度散布。沿岸 (南部) と内陸の県中央部に集中
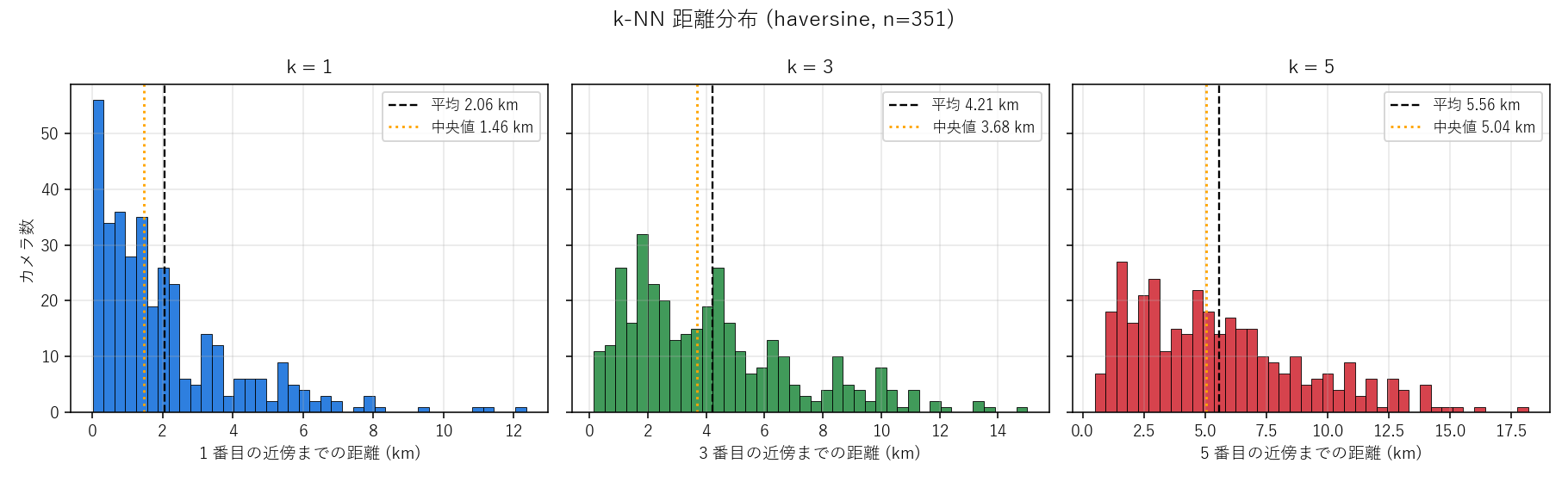
k-NN 距離分布 (k=1,3,5)。中央値が k に対し概ね 1.5〜2 倍程度に伸びるのは局所的にカメラが密集している証拠 (一様分布なら √k スケール)
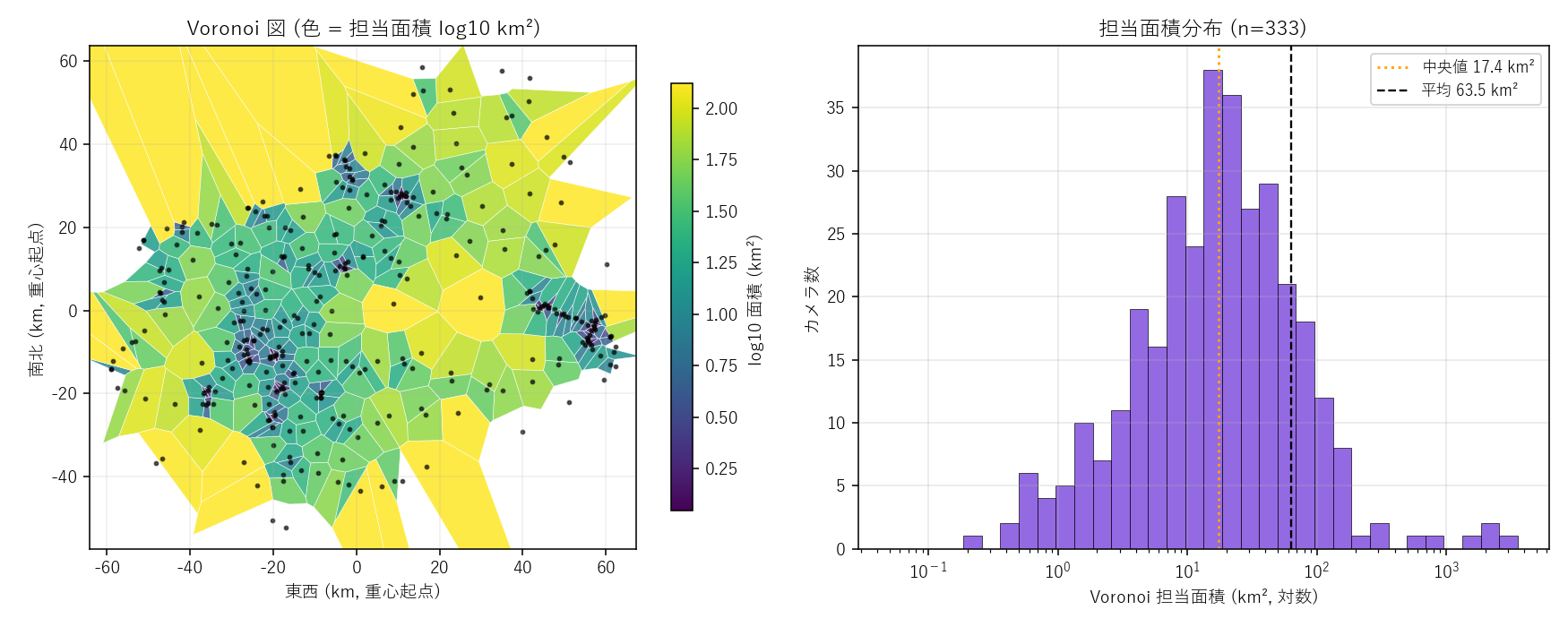
左: Voronoi 図 (色 = log10 担当面積)。沿岸の道路・河川カメラは小さなセル、北部山地は大きなセル / 右: 担当面積の対数ヒストグラム。3 桁にまたがり強い右裾分布
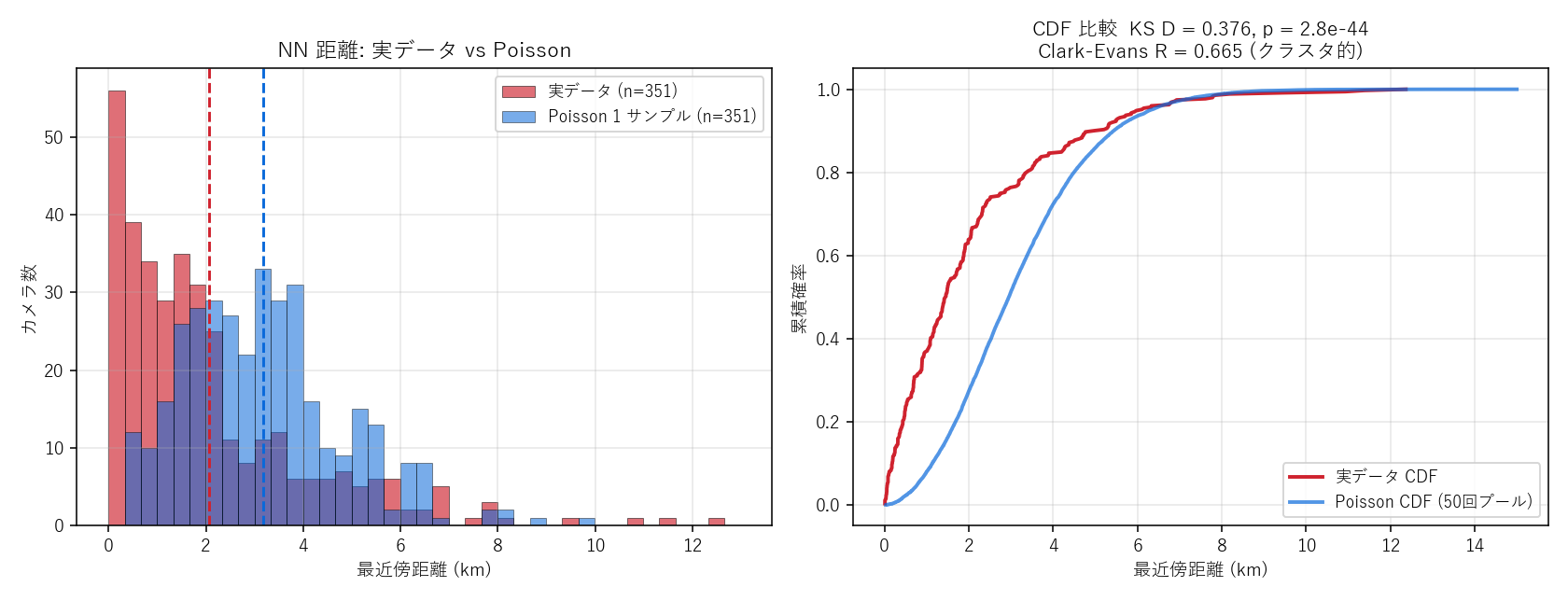
左: 実データ NN 距離 vs 同領域 Poisson 配置 NN 距離 / 右: CDF 比較と KS 検定。実データが Poisson より小さい距離側に偏る = クラスタ的。Clark-Evans R が判定指標
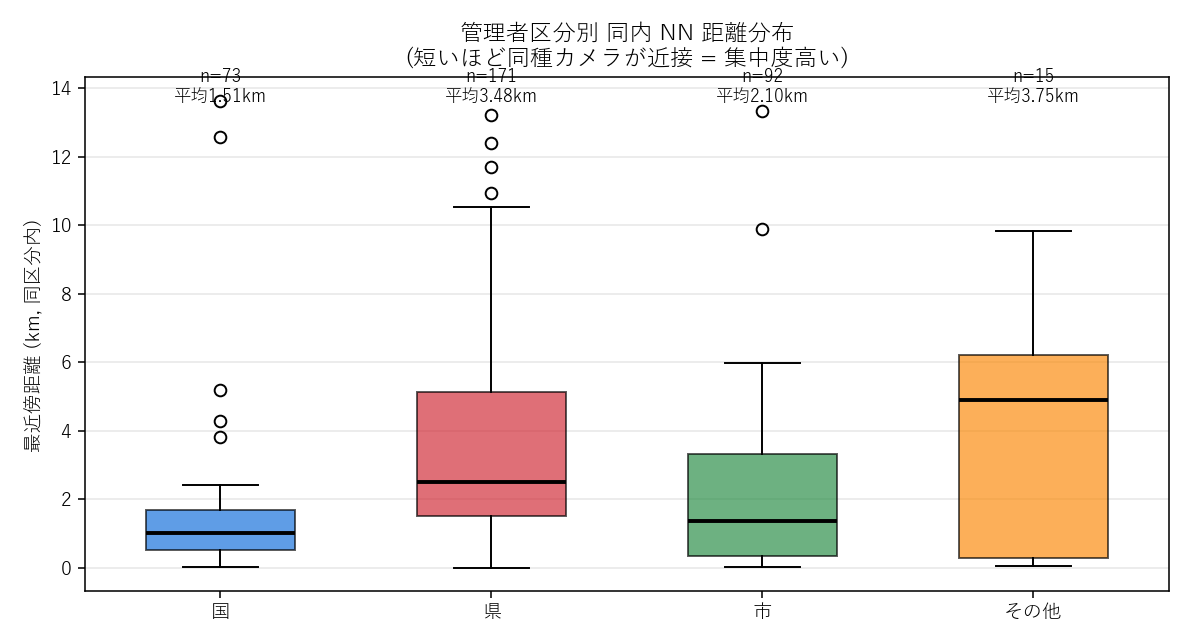
管理者区分別 同内 NN 距離分布。国 (国交省) は限られた幹線沿いに集中するため箱が低め、県・市は広域分散
主要指標サマリ
| 指標 | 値 |
|---|---|
| 総カメラ数 (有効緯度経度) | 351 台 |
| 領域面積 (bounding box) | 13454 km² |
| 点密度 | 0.0261 点/km² |
| 実 NN 平均距離 | 2.06 km |
| CSR 期待 NN (1/(2√λ)) | 3.10 km |
| Clark-Evans R | 0.665 |
| KS 検定 (実 vs Poisson) | D=0.376, p=2.83e-44 |
| Voronoi 担当面積 中央値 | 17.4 km² |
| Voronoi 担当面積 平均 | 63.5 km² |
管理者区分別 同内 NN 距離
| 管理者区分 | n | NN 平均 (km) | NN 中央値 (km) |
|---|---|---|---|
| 国 | 73 | 1.514 | 1.014 |
| 県 | 171 | 3.480 | 2.512 |
| 市 | 92 | 2.097 | 1.384 |
| その他 | 15 | 3.750 | 4.897 |
考察
- 「ランダム」より明らかにクラスタ的: Clark-Evans R が 1 を大きく下回り、KS 検定でも実データと Poisson 配置の差が極めて有意 (p ≪ 0.001)。 カメラは 監視対象 (道路・川筋・ため池)に沿って配置されるため、空間的に均一にはならない — これは 定量的に裏取りできた。
- Voronoi 面積の対数ヒストグラムが右裾を引くのは、北部山地に「面積数百 km² の担当セル」が少数できる一方、 広島市〜呉のベルト地帯に「面積 1 km² 未満のセル」が多数できているため。「平均1台あたり何 km²」は誤解を招く: 中央値とパーセンタイルで語るのが正しい。
- 管理者区分による空間構造の違い: 国 (国交省) のカメラは 主要国道・1級河川沿いの線状配置で同内 NN が短い。 県・市は 広域に分散するため同内 NN が長い。「データの集中度はそのまま行政の役割分担を映す」。
- k-NN の k に対する伸び方は 密度が局所的に違うこと (= 不均質な点過程) を示唆。 均一 Poisson なら NN_k の中央値は √k に比例して伸びるが、実データはそれより緩やかに伸びる箇所もある — 高密度クラスタの内側に居る点は k=5 でも近傍が尽きないためで、 「クラスタの大きさ」を測る教材 (Ripley K) への自然な接続点になる。
- folium 2 レイヤの教育的意義: MarkerCluster は「個々を見る」、HeatMap は「全体傾向を見る」。 切り替えで「ミクロ ⇄ マクロ」を体験できる。可視化は1枚の地図に詰め込まないのが鉄則。
発展課題
- Ripley K 関数を実装して、距離 r を変えながら「どのスケールでクラスタ的か」を出す。今回の Clark-Evans R は r=NN距離スケールでの 1 点指標にすぎない。
- 道路ネットワーク距離での NN 計算: ユークリッド距離ではなく OSMnx で取った道路グラフ上の距離で再計算すると、海越し・山越しの不自然な近接が消える。
- 属性条件付き: 「ため池カメラから一番近い河川カメラまで」のような 異種 NN。L09 (避難所×カメラ) と同じ枠組みで多変量化。
- 動的 Poisson: 矩形ではなく広島県境界 GeoJSON で領域を取り直し、より厳密な CSR を定義。
- 稼働率と組合せ:
requests.headで各公開URLを叩き、応答 200 のカメラだけで NN を再計算。「公開されているカメラのカバレッジ」が見える。 - 市区町村別 1人あたりカメラ数: 住所列から市町村抽出 → 国勢調査人口で割って カメラ密度の格差を地図化 (L09 接続)。